阪大フロンティア研究機構が取り組む
5つの研究プロジェクト①
|
|
「力で原子を動かす」・・・ナノ力学プロジェクト
ナノメートル(10-9m:100万分の1mm)サイズの世界では、日常的(マクロ)な世界ではほとんど感じることができない特殊な力(原子間あるいは分子間相互作用)が個々の原子・分子の運動を大きく支配するようになります。本プロジェクトでは、このようなナノスケールに固有の力を利用して個々の原子や分子を力学的に操作し、カーボンナノチューブなどに代表される新ナノ物質や新ナノデバイスを組み立てるための未来技術を確立します。さらに、この新しいナノスケールの力学に基づいた次世代ナノテクノロジーを開発することを目的とします。
<プロジェクト・リーダー 森田清三教授> |
|
力学的原子操作の実験例 |
|
阪大フロンティア研究機構が取り組む
5つの研究プロジェクト② |
|
「光でナノを操る」・・・ナノフォトニクスプロジェクト
光は、ふつうの光学レンズ等を用いると、その波動性から0.5ミクロン程度にまでしか絞ることができません。したがって、光学顕微鏡でナノスケールの構造を見たり、操ることはできないというのが、これまでの常識でした。本プロジェクトでは、その常識を覆す「非線形光学」や「近接場光学」と呼ばれる最新の科学を駆使して、ナノ構造をフォトンで計測、加工、制御する技術を開発し、生体材料や電子部品(ナノデバイス)への応用を目指します。
<プロジェクト・リーダー 河田 聡教授>
たとえば、分子で機能する色素(染料)は高い発色性と彩度を示しますが、耐水性や耐光性が弱く、他方そのマイクロメートルサイズの結晶粒子(顔料)は耐水性や耐光性は高いのですが発色性や彩度が劣ります。レーザーでナノ粒子をつくる方法であるレーザーアブレーション法などにより、その2つの長所を有する新しい記録材料として、数十ナノメートルサイズの有機顔料の超微粒子を作製することがあげられます。
|
 |
| 液中パルスレーザーアブレーション法 |
|
| 液中パルスレーザーアブレーション法とは、レーザーをあてて、液体中の固体をバラバラにし、超微粒子にすることをいいます。 |
|
阪大フロンティア研究機構が取り組む
5つの研究プロジェクト③ |
|
「ナノでモノづくり」・・・ナノ構造分子化学プロジェクト
本プロジェクトは、新しいものを作り出せるという化学特有の特徴を生かして、「設計どおりのナノ構造を持った分子を作る手法の開発」、「光や電子に応答するなどの特別な機能をもった分子をつくる」、「特別な分子だけを見分けて変化させる機能を持たせたナノ触媒をつくる」ことを三つの大きな目標としています。従来の手法では小さな分子同士をひとつずつ化学結合により組み上げていたのですが、ここでは分子の自己集積能力や界面での規則正しい集合能力、および多くの弱い力が集まってできる「超分子」の特性をいかして、ナノ構造を作ります。これらの方法で、超精密重合を推進したり、従来の機能を大きく超える光と磁気特性をそなえた機能性ナノ分子を生み出します。さらに、環境に負担をかけない「ものづくり」に必須の機能触媒をナノ機能により創製していきます。
<プロジェクト・リーダー 馬場章夫教授>
たとえば、有機酸、有機塩基などが自己集積する力を利用して、表面や膜の集積構造を設計しますが、これも分子1個の構造と分子集合体の構造との関係、さらに機能との相関を分子化学的に深く理解することが鍵になります。
|
|
 |
|
阪大フロンティア研究機構が取り組む
5つの研究プロジェクト④ |
|
「ナノで夢の材料」・・・複合機能化ナノマテリアルプロジェクト
材料を構成する結晶の寸法をナノメートル寸法まで極限化すると、非常に強くなるがその反面脆くなり使えない、といったように、他の特性の劣化をもたらす場合があります。本プロジェクトでは、ナノ物質固有の極微細構造・組織、機能の制御およびその創製プロセスの開発だけでなく、実用スケールに発展させ、複数の優れた要素特性を備えたナノマテリアルを創製するための複合化、材料協調設計を行います。また、これら材料中の原子配列の乱れの計測、磁気的・電気的特性などの優れた機能の評価とその信頼性評価ならびに評価法の開発を行います。
<プロジェクト・リーダー 馬越佑吉教授> |
|
 |
| 複合機能化ナノマテリアル |
|
阪大フロンティア研究機構が取り組む
5つの研究プロジェクト⑤ |
|
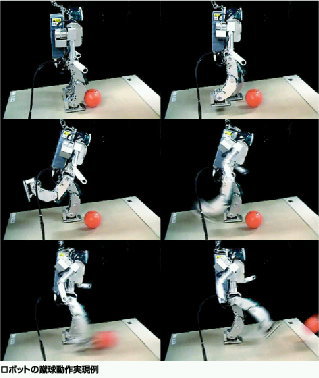
ロボカップ人間型ロボットリーグへの挑戦
しゅう きゅうけ 阪大は、手塚治虫の「アトム」を生んだことをはじめとして、現在では2足歩行のヒューマノイド(人間型)ロボットを製作するに至っており、ロボットの最先端研究のメッカです。本プロジェクトのリーダーは、ロボットによるサッカー競技「ロボカップ」を、人工知能とロボット学の新たなる挑戦課題としてきました。本プロジェクトでは、小型ヒューマノイドロボットによる「歩く」、「走る」、「投げる」、「球を蹴る」、「攻撃する」、「守る」などの個別の運動技能、ならびに複数のロボットによるチームプレーが可能になる協調したり競争したりという行動などの学習の実現を目指します。そして、ロボカップヒューマノイドロボットリーグに挑戦します。すでに基本動作としての蹴球動作を実現しています。
<プロジェクト・リーダー 浅田 稔教授> |
|
 |
|